分布式快照 Chandy-Lamport 算法
1. Overview
A snapshot algorithm is used to create a consistent snapshot of the global state of a distributed system. Due to the lack of globally shared memory and a global clock, this isn't trivially possible.
分布式快照算法用来在缺乏类似全局时钟或者全局时钟不可靠的分布式系统中来确定一种全局状态。
分布式快照算法应用到流式系统中就是确定一个 Global 的 Snapshot,错误处理的时候各个节点根据上一次的 Global Snapshot 来恢复。
2. Global Snapshot
Global Snapshot,即 Global State(全局状态),常用于在系统做 Failure Recovery 的时候。
分布式系统的全局状态的定义:先将分布式系统简化成有限个进程和进程之间的 channel 组成,也就是一个有向图
- 节点是进程,边是 channel(分为 input channel 和 output channel);
- 一个分布式系统的全局状态就是由进程的状态和 channel 中的 message 组成;
channel 表示的是发送消息的通道(可以等价于TCP连接),并不是发送消息和接受响应消息是两个channel。
3. Chandy-Lamport 算法
可以处理环形的图。
算法假定:
- Channel 是一个容量无限大的 FIFO 队列
- 收到的 message 都是有序且无重复的
局部快照:每个进程的 local state 和它的 input channel 中有序的 message。
全局快照:所有的进程的局部快照合并起来。
- 唯一的问题是如何确定同一时刻的局部快照;
算法流程分为以下三部分:
- Initiating a snapshot: 也就是开始创建 snapshot,可以由系统中的任意一个进程发起
- Propagating a snapshot: 系统中其他进程开始逐个创建 snapshot 的过程
- Terminating a snapshot: 算法结束条件
初始化快照
进程 \(P_i\) 发起:记录自己的进程状态,同时生产一个标识信息 marker,marker 和进程通信的 message 不同
- 将 marker 信息通过 ouput channel 发送给系统里面的其他进程
- 开始记录所有 input channel 接收到的 message
传播快照
marker 当作一个分隔符,分割进程做 local snapshot(记录进程状态)的message;
进程 \(P_j\):从 input channel \(C_{kj}\)(来自于进程\(P_k\))接收到 marker 信息
-
如果,\(P_j\)还没有记录自己的进程状态
-
Pj 记录自己的进程状态,同时将 input channel \(C_{kj}\) 置为空
-
向 output channel 发送 marker 信息
-
否则
- 更新 input channel \(C_{kj}\)的状态为:从\(P_j\)记录自己的状态后收到的第一条消息,到收到marker之前的最后一条 message
结束快照
所有的进程都收到 marker 信息并且记录下自己的状态和 channel 的状态(包含的 message)。
- 每个进程可以将状态存储在 DB/FS 上。
疑问
- 有向图,快照是从哪一个节点发起?
- 无环的图:从根节点发送(DAG拓扑序);
- 有环的图:任意一个节点,都可以发起,因为图是连通的;
- 如果\(P_j\)从多个链路收到了同样的marker,应该如何处理自身的状态?
- 收到第一个marker时,就记录自身的状态(且将接受到第一个marker的input channel-x的channel snapshot记为空);
4. 示例
假设系统中包含两个进程 \(P_1\) 和 \(P_2\),初始状态如下:
- \(P_1\) 进程状态包括三个变量 \(X_1,Y_1,Z_1\); \(P_2\) 进程包括三个变量 \(X_2,Y_2,Z_2\);
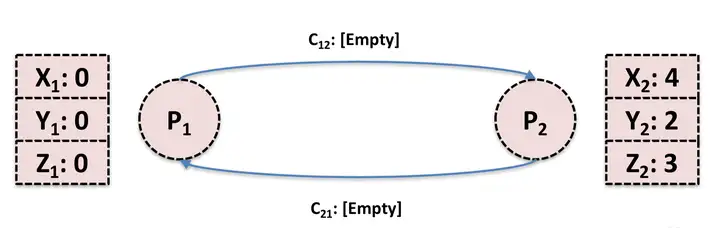
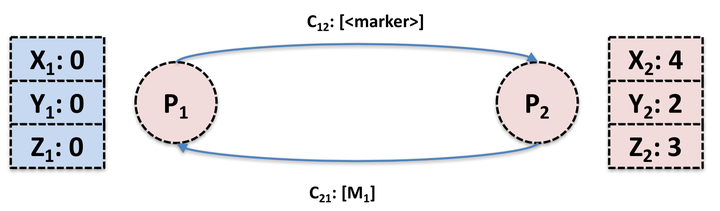
由 \(P_1\) 发起全局 Snapshot 记录,\(P_1\) 先记录本身的进程状态,然后向 \(P_2\) 发送 marker 信息。在 marker 信息到达 \(P_2\) 之前, \(P_2\) 向 \(P_1\) 发送 message: M。
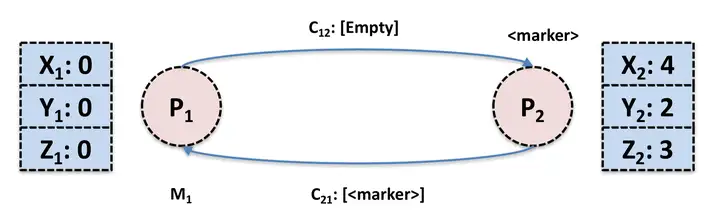
\(P_2\) 收到 \(P_1\) 发送过来的 marker 信息
- 记录自己的状态。
\(P_1\) 收到 \(P_2\) 之前发送过来的 message: M
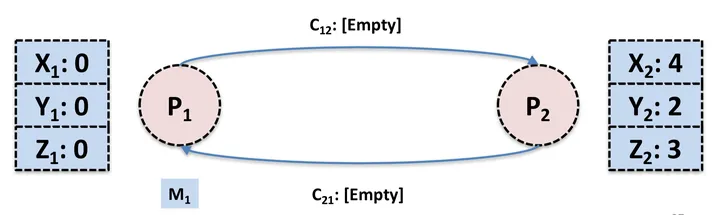
- 对于\(P_1\) 来说,从 \(P_2\) channel 发送过来的信息相当于是 [M, marker],由于 \(P_1\) 已经做了 local snapshot,所以 \(P_1\) 需要记录 message M。
那么全局 Snapshot 就相当于下图中的蓝色部分。
5. 参考文献
- Distributed Snapshots: Determining Global States of a Distributed System, https://lamport.azurewebsites.net/pubs/chandy.pdf
- 分布式快照算法 Chandy-Lamport:https://github.com/legendtkl/paper_reading/blob/main/realtime-compute/Chandy-Lamport.md