Hash 表
哈希表是根据设定的哈希函数H(key)和处理冲突方法将一组关键字映射到一个有限的地址区间上,并以关键字在地址区间中的象作为记录在表中的存储位置,这种表称为哈希表或散列,所得存储位置称为哈希地址或散列地址。
热点Hash
内存KVS引擎通常采用链式哈希作为索引,访问位于冲突链尾部的数据,需要经过更多的索引跳数:
- 将热点数据放置在冲突链头部,那么系统对于热点数据的访问将会有更快的响应速度。
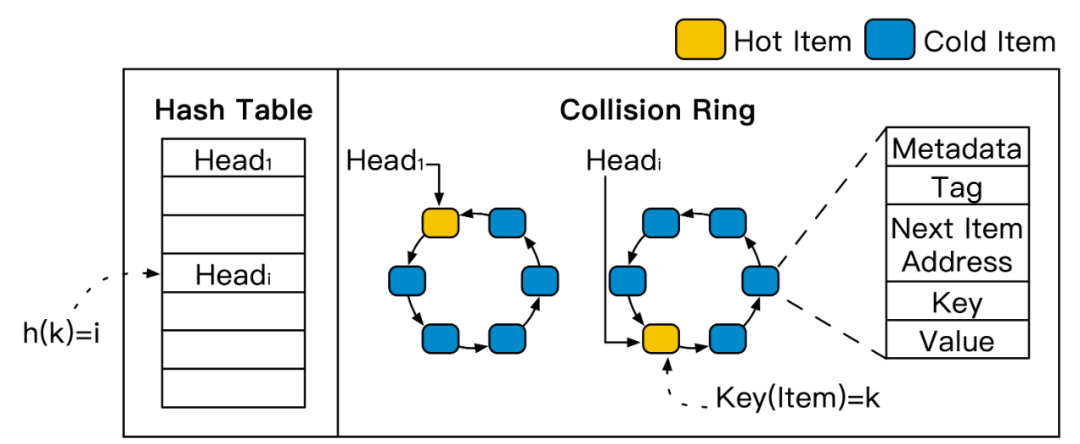
有序环式哈希索引
- 将冲突链首尾连接形式冲突环,保证头指针指向任何一个item都可以遍历环上所有数据
- 通过lock-free移动头指针,动态指向热度较高的item(或根据算法计算出的最优item位置)
有序环
在环上,所有数据都会动态变化(更新或删除),头指针同样也会动态移动,没有标志可以作为遍历的终止判断。
- key排序:若目标key介于连续两个item的key之间,说明为read miss操作,即可终止返回;
- key简化:利用tag来减少key的比较开销,字典序:order = (tag, key)
- tag是哈希值的一部分,每个key计算的哈希值,前k位用来哈希表的定位,后n-k位作为tag;
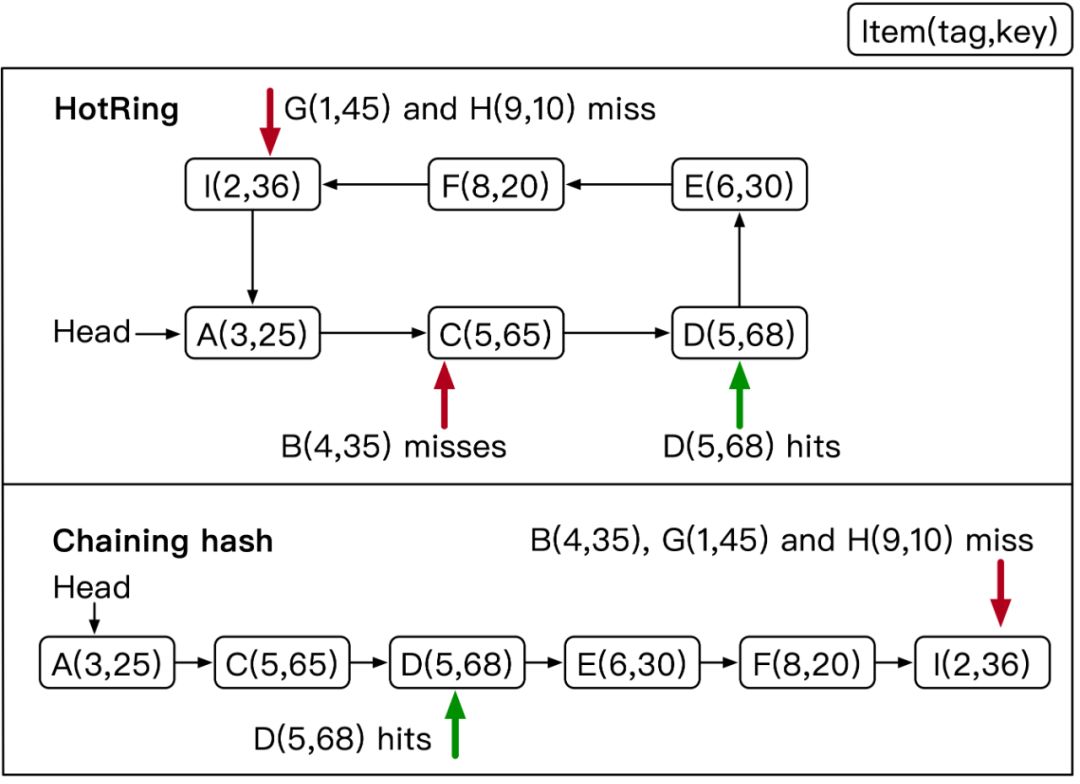
以 itemB 举例:
- 链式哈希需要遍历所有数据才能返回read miss。而HotRing在访问itemA与C后,即可确认B read miss。
动态识别与调整
每R次访问为一个周期(R通常设置为5),第R次访问的线程将进行头指针的调整:
-
随机移动策略:每R次访问,移动头指针指向第R次访问的item。若已经指向该item,则头指针不移动。该策略的优势是, 不需要额外的元数据开销,且不需要采样过程,响应速度极快。
-
采样分析策略:每R次访问,尝试启动对应冲突环的采样,统计item的访问频率。若第R次访问的item已经是头指针指向的item,则不启动采样。
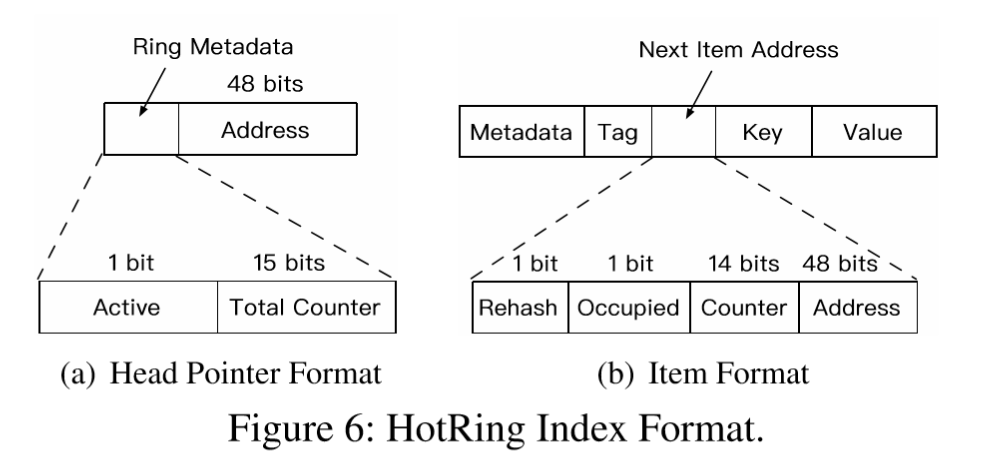
采样分析策略:利用了head pointer / next pointer的剩余空间,因为指示地址用48位就够了,这样还有16位:
- head pointer:16位分成1 bit的active位以及15位的total counter位(记录当前这个bucket的访问次数);
- next pointer:1 bit Rehash位,1bit Occupied位和14 bit的counter位,Rehash和Counter分别用于并发的rehash和update操作。
TODO:性能提升2.58倍!阿里最快KV存储引擎揭秘 (qq.com)
无锁并发访问
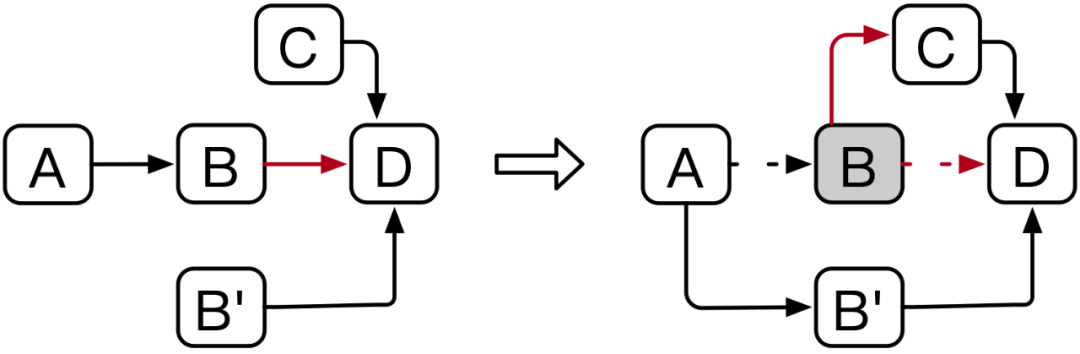
修改和更新并发正确性问题:
- 在链A->B->D上,线程1进行插入C的操作,同时线程2进行RCU更新B的操作,尝试更新为B'。线程1修改B的指针指向C,完成插入。而线程2修改A的指针指向B'完成更新。两个线程并发修改不同的内存,均可成功返回。但是这时遍历整条链(A->B'->D),将发现C无法被遍历到,导致正确性问题。
解决措施
- 利用Item的Occupied标志位。当线程2更新B时,首先需要将B的Occupied标志位置位。线程1插入C需要修改B的指针(Next Item Address),若发现Occupied标志位已置位,则需要重新遍历链表,尝试插入。通过使并发操作竞争修改同一内存地址,保证并发操作的正确性。
适应热点数据量的无锁rehash
引擎性能的降低,必然是因为冲突环上存在多个热点。
- 利用访问所需平均内存访问次数(access overhead)来替代传统rehash策略的负载因子(load factor)。
在幂率分布场景,若每个冲突环只有一个热点,HotRing可以保证access overhead < 2,即平均每次访问所需内存访问次数小于2。
- 设定access overhead阈值为2,当大于2时,触发rehash。
rehash过程分为3步进行:图一为哈希表,哈希值在rehash前后的变化。剩余三图为rehash三个过程。
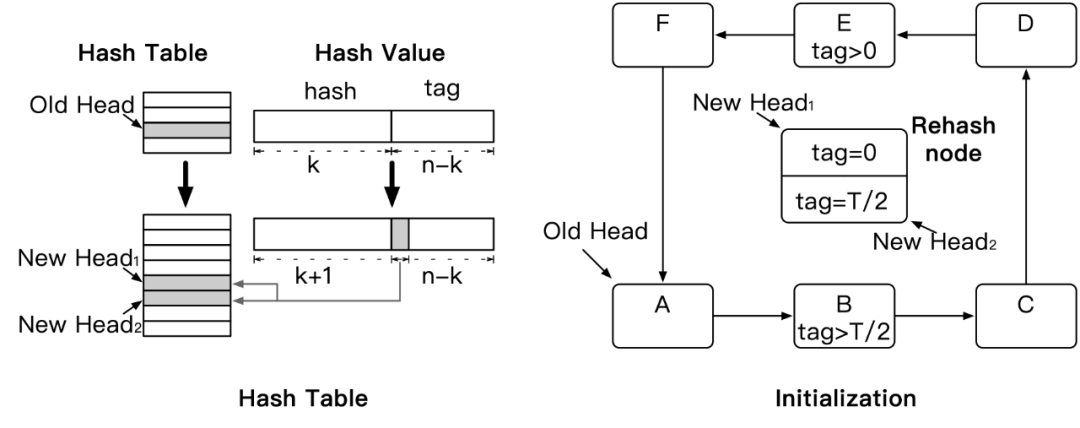
- 初始化:创建后台rehash线程,创建2倍空间的新哈希表,通过复用tag的最高一位来进行索引;
- 新表中将会有两个头指针与旧表中的一个头指针对应;
- 假设tag最大值为T,tag范围为[0,T),则两个新的头指针对应tag范围为[0,T/2)和[T/2,T);
- rehash线程创建一个rehash节点(包含两个空数据的子item节点),子item节点分别对应两个新头指针,利用item中的Rehash标志位识别rehash节点的子item节点。
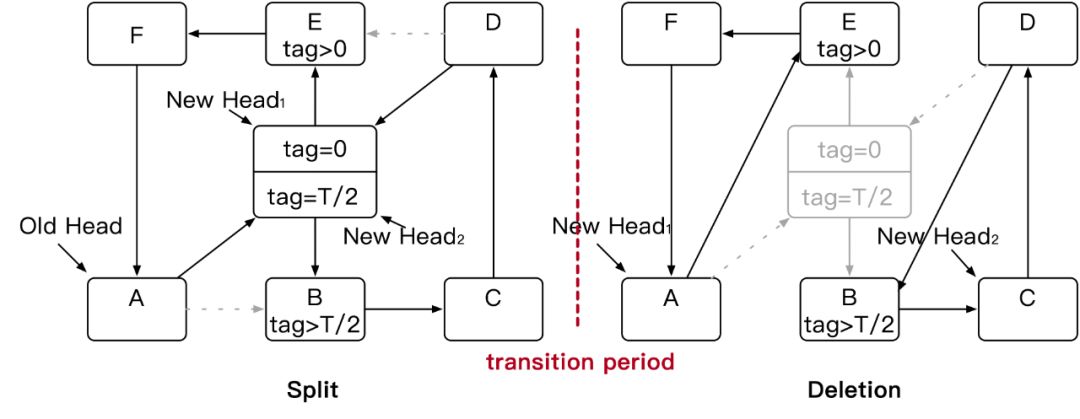
- 分裂:rehash线程通过将rehash节点的两个子item节点插入环中完成环的分裂。
- 如图(Split)所示,因为itemB和E是tag的范围边界,所以子item节点分别插入到itemB和E之前。
- 完成两个插入操作后,新哈希表将激活,所有的访问都将通过新哈希表进行访问;
- 逻辑上将冲突环一分为二。当我们查找数据时,最多只需要扫描一半的item。
- 删除:收尾工作,包括旧哈希表的回收和rehash节点的删除回收。
分裂阶段和删除阶段间,必须有一个RCU静默期(transition period)。
- 静默期保证所有从旧哈希表进入的访问均已经返回。否则,直接回收旧哈希表可能导致并发错误。