多处理器系统与中断机制
本讲内容:操作系统内核实现
- 多处理器和中断
- AbstractMachine API
- 50 行实现嵌入式操作系统
为什么 while (1) 不会把操作系统 “卡死”:
- 在操作系统代码切换到应用程序执行时,操作系统内核会打开中断
- “不可信任” 的应用程序定期会收到时钟中断被打断,且应用程序无权配置中断
- 操作系统接管中断后,可以切换到另一个程序执行
多处理器上的操作系统内核
AbstractMachine: TRM
Turing Machine: 一个处理器,一个地址空间
- “无情的执行指令的机器” (rvemu) 的抽象
- 可用的内存是静态变量和
heap - 只能执行计算指令和 putch, halt
AbstractMachine: MPE
Multiprocessing Extension: 多个处理器,一个地址空间
- 可用的地址空间依然是静态变量和
heap(处理器间共享) - “多个 Turing Machine,共享一个纸带”
状态机模型发生了改变
- 状态:共享内存和每个处理器的内部状态
\((M,R_1,R_2,…,R_n)\)
-
状态迁移:处理器 t 分隔出一个 “单处理器计算机”
-
执行\((M,R_t)→(M^′,R_t^′)\)
v\((M,R_1,R_2,…,R_n)→(M^′,R_1,R_2,…,R_t^′,…,R_n)\)
简易多处理器内核 (L1 的模型)
与多线程程序完全一致
- 同步仅能通过原子指令如
xchg实现
uint8_t shm[MEM_SIZE]; // Shared memory
void Tprocessor() {
struct cpu_state s;
while (1) {
fetch_decode_exec(&s, shm);
}
}
int main() {
for (int i = 0; i < NPROC; i++) {
create(Tprocessor);
}
}
中断机制
理解中断
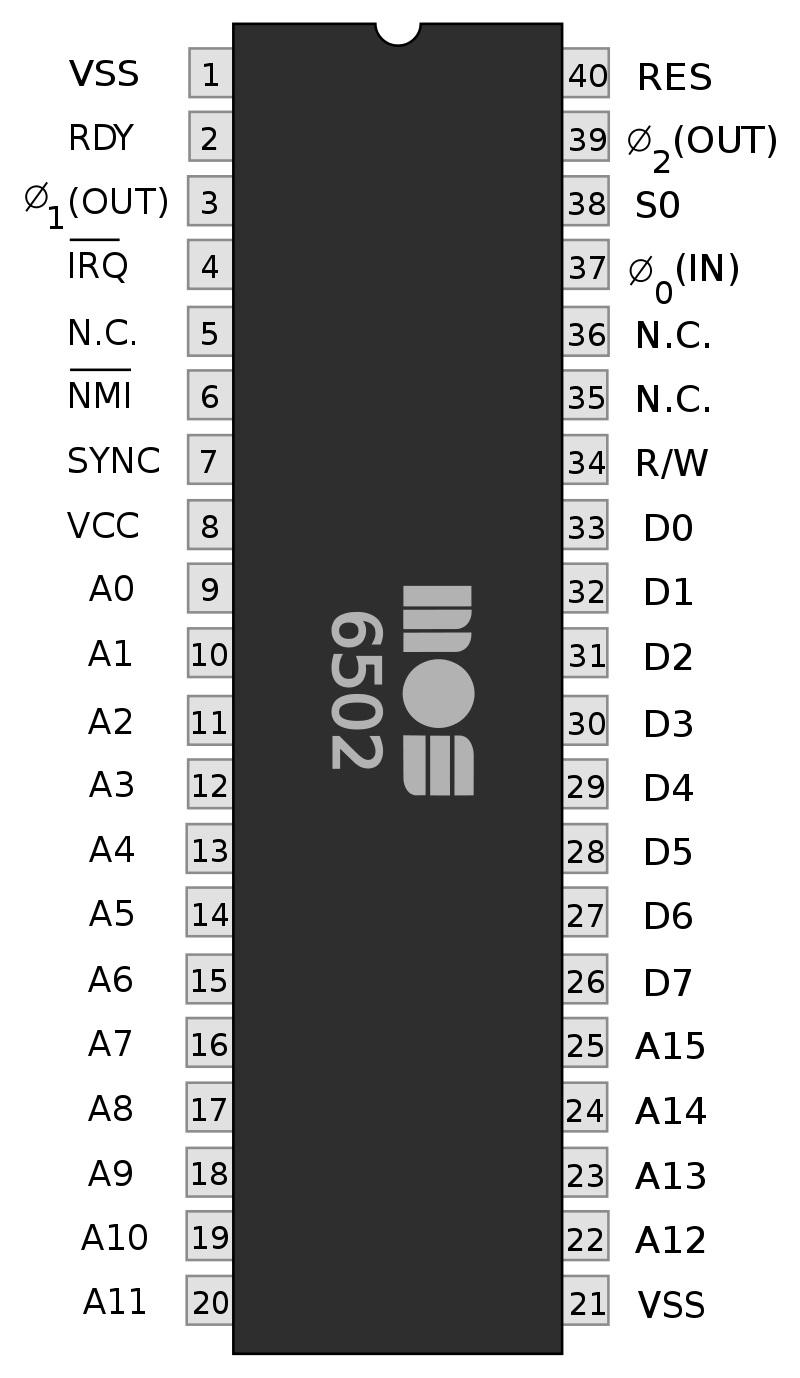
硬件上的中断:一根线
- \(\overline{IRQ}, \overline{NMI}\)(边沿触发,低电平有效):IRQ(中断要求),NMI(不可屏蔽中断)
- “告诉处理器:停停,有事来了”
- 剩下的行为交给处理器处理
实际的处理器并不是 “无情地执行指令”
- 无情的执行指令
- 同时有情地响应外部的打断
处理器的中断行为
“响应”
- 首先检查处理器配置是否允许中断
- 如果处理器关闭中断,则忽略
- x86 Family
- 询问中断控制器获得中断号 n
- 保存 CS, RIP, RFLAGS, SS, RSP 到堆栈
- 跳转到
IDT[n]指定的地址,并设置处理器状态 (例如关闭中断) - RISC-V (M-Mode)
- 检查 mie 是否屏蔽此次中断
- 跳转
PC = (mtvec & ~0xf) - 更新
mcause.Interrupt = 1
RISC-V M-Mode 中断行为 RTFSC
“更多的处理器内部状态”
struct MiniRV32IMAState {
uint32_t regs[32], pc;
uint32_t mstatus;
uint32_t cyclel, cycleh;
uint32_t timerl, timerh, timermatchl, timermatchh;
uint32_t mscratch, mtvec, mie, mip;
uint32_t mepc, mtval, mcause;
// Note: only a few bits are used. (Machine = 3, User = 0)
// Bits 0..1 = privilege.
// Bit 2 = WFI (Wait for interrupt)
// Bit 3+ = Load/Store reservation LSBs.
uint32_t extraflags;
};
中断:奠定操作系统 “霸主地位” 的机制
操作系统内核 (代码):想开就开,想关就关
应用程序:对不起,没有中断(死循环也可以被打断)
- 在 gdb 里可以看到 flags 寄存器 (
FL_IF) - CLI — Clear Interrupt Flag
#GP(0)If CPL is greater than IOPL and less than 3- 试一试
asm volatile ("cli");:segment fault;
AbstractMachine 中断 API
隔离出一块 “处理事件” 的代码执行时空
- 执行完后,可以返回到被中断的代码继续执行
bool cte_init(Context *(*handler)(Event ev, Context *ctx)); // interrupt handler
bool ienabled(void); // interrupt enabled or not
void iset(bool enable); // set interrupt
中断引入了并发
- 最早操作系统的并发性就是来自于中断 (而不是多处理器)
- 关闭中断就能实现互斥
- 系统中只有一个处理器,永远不会被打断
- 关中断实现了 “stop the world”
真正的计算机系统模型
状态:共享内存和每个处理器的内部状态\((M,R_1,R_2,…,R_n)\)
状态迁移
- 处理器 t 执行一步$ (M,R_t)→(M^′,R_t^′)$
- 新状态为 \((M^′,R_1,R_2,…,R_t′,…,R_n)\)
- 处理器 t 响应中断
假设 race-freedom
- 不会发生 relaxed memory behavior
- 模型能触发的行为就是真实系统能触发的所有行为
例子:实现中断安全的自旋锁
内核中的线程并发。
实现原子性:
- printf 时可能发生中断
- 多个处理器可能同时执行 printf
这件事没有大家想的简单
- 多处理器和中断是两个并发来源
50 行实现操作系统内核
中断处理程序的秘密
参数和返回值 “Context”
- 中断发生后,不能执行 “任何代码”
movl $1, %rax先前状态机就被永久 “破坏” 了- 除非把中断瞬间的处理器状态保存下来
- 中断返回时需要把寄存器恢复到处理器上
- 看看 Context 里有什么吧
实现多处理器多线程
AbstractMachine API
- 你只需要提供一个栈,就可以创建一个可运行的 context